内容提要:通过广州轨道交通四号线大学城专线【仑头~大学城盾构区间】隧道盾构掘进的实践,介绍了地铁盾构施工中的控制测量、联系测量、VMT导向系统、盾构姿态人工检测、管环检测的技术和经验,其中VMT导向系统的应用和维护及经验教训是本文介绍的重点。
关键词:平面控制、高程控制、联系测量、导向系统、盾构姿态、管环检测
1控制测量
1.1平面控制测量:
1.1.1平面控制测量概述:
地铁施工领域里平面控制网分两级布设,首级为GPS控制网,二级为精密导线网。施工前业主会提供一定数量的GPS点和精密导线点以满足施工单位的需要。施工单位需要做的是在业主给定的平面控制点上加密地面精密导线点,然后是为了向洞内投点定向而做联系测量,最后是在洞内为了保证隧道的掘进而做施工控制导线测量。不管是地面精密导线还是洞内施工控制导线都是精密导线测量,虽然边长不满足四等导线的要求,但是基本上是采用四等导线的技术要求施测,其中具体技术要求在《地下铁道、轻轨交通工程测量规范》都有规定。
1.1.2地面平面控制测量:
在业主交接桩后,施工单位要马上对所交桩位进行复测。业主交桩数量有限,不一定能很好地满足施工的需要,所以经常要在业主所交桩的基础上加密精密导线点,以方便施工。特别是在始发井附近,一定要保证有足够数量的控制点,不少于3个。其具体技术要求在《地下铁道、轻轨交通工程测量规范》都有规定。
1.1.3 洞内平面控制测量
洞内施工控制导线一般采用支导线的形式向里传递。但是支导线没有检核条件,很容易出错,所以最好采用双支导线的形式向前传递。然后在双支导线的前面连接起来,构成附合导线的形式,以便平定测量精度。洞内施工控制导线一般采用在管片最大跨度附近安装牵制对中托架,测量起来非常方便,且可以提高对中精度,还不影响洞内运输。强制对中托架尺寸形状要控制好,以便可以直接安装在管片的螺栓上面,不需要电钻打眼安装。由于盾构施工一般都是双线隧道错开50环左右掘进,如果错开环数很大,后面掘进的盾构机由于推力很大,会对前面另一个洞的导线点产生影响。特别是在左右线间距较小岩层很软时,影响很大,很容易导致测量出大错。还有就是如果在曲线隧道里,管片上的导线点间的边角关系经常受盾构机的推力和地质条件的影响,所以要经常复测。
1.2 高程控制测量:
1.2.1高程控制测量概述:
高程控制测量主要包括地面精密水准测量和高程传递测量及洞内精密水准测量,在广州地铁领域里的精密水准测量也就是城市二等水准测量。不管是地面还是洞内都采用的是城市二等水准测量。其技术要求在《地下铁道、轻轨交通工程测量规范》都有规定。
1.2.2 地面高程控制测量
地面水准测量按城市二等水准的要求施测。
1.2.3洞内高程控制测量
洞内由于轨道上钢枕太多,轨道下的泥水经常盖到钢枕上来了,立尺很不方便,用水准仪配因钢尺测量非常麻烦。而采用全站仪三角高程测高差的办法传递高程就很方便。见图1。当然此时一定要保证前后视的棱镜高要不变,由于不需要量仪器高,而是通过测量前后两个点的高差来传递高程,所以往返观测取平均值精度可以满足施工的需要。这在我们仑官区间左、右线都得到证实,仑官区间约1.5公里,高程贯通误差左线是8㎜、右线都在11㎜左右。
图1全站仪三角高程测量传递高程
1.3 联系测量
1.3.1 定向测量
地铁施工规定,在任何贯通面上,地下测量控制网的贯通中误差,横向不超过±50㎜,竖向不超过±25㎜。联系测量主要有一井定向(联系三角形定向)、两井定向、铅垂仪陀螺经纬仪联合定向、导线定向四中方式,其中我们施工单位一般都没有陀螺经纬仪,所以很少采用铅垂仪陀螺经纬仪联合定向。用导线定向精度最好且最方便,但是用导线定向受始发井的长度和深度制约,一般也很少用。所以一般都采用一井定向(联系三角形定向)或两井定向,其中用两井定向受地面及洞内各种因素的制约要少,很方便,但是在同样的始发井长度和深度的情况下最好采用一井定向(联系三角形定向),这样有利于提高井下定向的精度。这在我们仑大始发井的多次联系测量中得到证实。虽然一井定向(联系三角形定向)对场地要求较高,做起来也很麻烦,但是定向精度很有保证。联系测量向洞内投点时把点间距尽量拉大些,在始发井底板,最好投四个点,保证始发井两端都各有两个控制点。且尽量保证每次联系测量投点时都投在这四个点上。以便取多次联系测量的加权平均值做为最终的始发控制点坐标。
图2一井定向联系测量示意图
图3两井定向联系测量示意图
1.3.2 高程传递测量
向洞内传递高程一般采用悬挂钢尺的方法,一定要注意加温度和尺长改正,才能保证导入井下的水准点的精度。如果有斜井或通道,也可以用水准测量的方法向井下传递高程。如果全站仪的仰俯角不大的话还可以直接用全站仪三角高程测高差的办法传递高程。
图4钢尺导入法传递高程
2导向系统:
2.1导向系统介绍
2.1.1VMT导向系统概述:
在掘进隧道的过程中,为了避免隧道掘进机(TBM)发生意外的运动及方向的突然改变, 必须对TBM的位置和DTA(隧道设计轴线)的相对位置关系进行持续地监控测量。TBM能够按照设计路线精确地掘进,则对掘进各个方面都有好处(计划更精确,施工质量更高)。这就是TBM采用“导向系统”(SLS)的原因。德国VMT公司的SLS-T系统就是为此而开发,该系统为使TBM沿设计轴线(理论轴线)掘进提供所有重要的数据信息。SLS-T系统功能完美,操作简单。
2.1.2导向系统基本组成与功能
导向系统是由激光全站仪(TCA)、中央控制箱、ESL靶、黄盒子和计算机及掘进软件组成。其组成见下图:
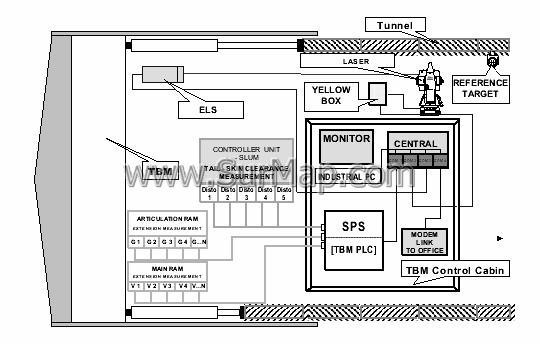
图5导向系统组成
2.1.2.1全站仪(TCA)
具有伺服马达,可以自动照准目标和跟踪,并可发射激光束,主要用于后视定向,测量距离、水平角和竖直角,并将测量结果传输到计算机。
2.1.2.2ESL靶
也称光靶板,是一台智能性型的传感器。ELS接收全站仪发射的激光束,测定水平和垂直方向的入射点。偏角由ELS上激光的入射角确认,坡度由该系统内的倾斜仪测量。ELS在盾构机体上的位置是确定的,即对TBM坐标系的位置是确定的。
2.1.2.3中央控制箱
主要的接口箱,它为黄盒子(继而为激光全站仪)及ELS靶提供电源。
2.1.2.4黄盒子
它主要为全站仪供电,保证全站仪工作和与计算机之间的通信和数据传输。
2.1.2.5计算机及掘进软件
SLS-T软件是自动导向系统数据处理和自动控制的核心,通过计算机分别与全站仪和ELS通信接收数据,盾构机在线路平、剖面上的位置计算出来后,以数字和图形在计算机上显示出来。如下图所示:
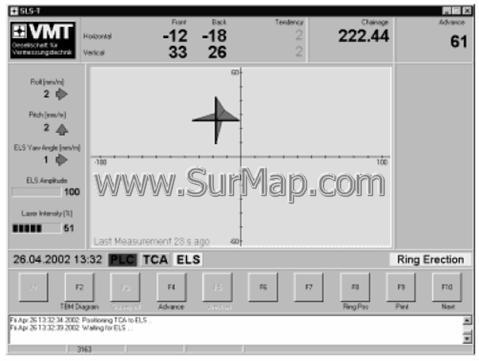
图6 VMT导向系统盾构姿态显示
2.1.3导向基本原理
洞内控制导线是支持盾构机掘进导向定位的基础。激光全站仪安装在位于盾构机的右上侧管片上的拖架上,后视一基准点(后视靶棱镜)定位后。全站仪自动掉过方向来,收寻ELS靶, ELS接收入射的激光定向光束,即可获取激光站至ELS靶间的方位角、竖直角,通过ELS棱镜和激光全站仪就可以测量出激光站至ELS靶间的距离。TBM的仰俯角和滚动角通过ELS靶内的倾斜计来测定。ELS靶将各项测量数据传向主控计算机,计算机将所有测量数据汇总,就可以确定TBM在全球坐标系统中的精确位置。将前后两个参考点的三维坐标与事先输入计算机的DTA(隧道设计轴线)比较,就可以显示盾构机的姿态了。
2.2导向系统应用
2.2.1 始发托架和反力架定位
盾构机初始状态主要决定于始发托架和反力架的安装,因此始发托架的定位在整个盾构施工测量过程中显得格外重要。盾构机在曲线段始发方式通常有两种:切线始发和割线始发,两种始发方式示意图见下图7:
图7 切线和割线始发示意图
始发托架的高程要比设计提高约1~5㎝,以消除盾构机入洞后“栽头”的影响。反力架的安装位置由始发托架来决定,反力架的支撑面要与隧道的中心轴线的法线平行,其倾角要与线路坡度保持一致。
2.2.2 移站
2.2.2.1激光站人工移站
盾构机的掘进时的姿态控制是通过全站仪的实时测设ELS的坐标,反算出盾构机盾首、盾尾的实际三维坐标,通过比较实测三维坐标与DTA三维坐标,从而得出盾构姿态参数。随着盾构机的往前推进,每隔规定的距离就必须进行激光站的移站。激光站的支架用角钢和钢板做成可以安装在管片螺栓的托架形似, 托架的底板采用400×400×10mm钢板,底板中心焊上仪器连接螺栓,长1㎝。采取强制对中,减少仪器对中误差。托架安装位置在隧道右侧顶部不受行车的影响和破坏的地方。安装时,用水平尺大致调平托架底板后,将其固定好,然后可以安装前视棱镜或仪器。托架示意图如下图8:
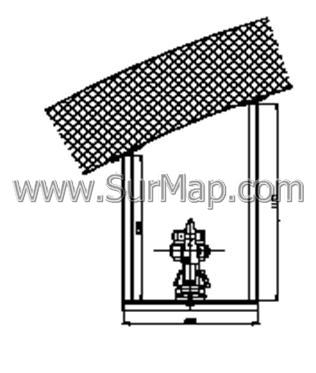
图8 激光站的托架示意图
一般在后视靶托架即将脱出盾构机最后一节台车后进行,这样就可以直接站在盾构机上移站,不需要搭楼梯,既安全又方便。把前视棱镜安装在后视托架后,测量出棱镜中心到托架底板的高程,然后直接从下面的测站采用极坐标测量方式测出托架的三维坐标。然后在后视靶托架上设站,前视直接采用极坐标测量方式测出激光站托架的三维坐标。然后把后视棱镜安装在后视靶托架上,把激光全站仪安装在激光站托架上整平,把黄盒子固定好,给全站仪接上电源,手动把全站仪瞄准后视棱镜,瞄准的精度在±10㎝左右,然后把全站仪电源关闭。接着在主空室里,启动SLS-T,按“编辑器—F2”进入编辑器窗口,进入激光站编辑窗口,输入激光全站仪中心和后视靶棱镜中心的三维坐标。按“保存”键保存,然后关闭编辑器窗口。再按“定位—F5”键,给激光全站仪定位。定位完成后,再按“方位检查—F5”键,检查激光站和后视棱镜的坐标有没有错误。如果超限,将会显示差值,如果不超限,那么将不显示。最后再按“推进—F4”就完成了激光站的人工移站的全过程。
2.2.2.2激光站自动移站
VMT导向软件SLS—T有激光站自动移站功能,移站的过程除了托架和全站仪及后视棱镜的安装,其它测量工作都可以通过此功能完成。
操作流程为:
程序的启动及后续测量工作在主控室进行。此时SLS-T软件处于“管片拼装”状态,按功能键F3,关闭测量后,通过功能键“激光站移站—F6”来启动程序。在初始窗口中,按下按钮“测量开始—F2”,启动方位检测程序。方位检测被成功的执行后,显示检测结果,在得到理想的结果后,按下F2确认后方位检测的结果。在测定新激光站点坐标前,事先在信息输入窗口中输入如下信息:水平与垂直方向上偏移的近似值及新激光站点的大致里程;当前棱镜的高度及仪器的高度;新站点的点位编码。在信息输入窗口下,按下F2键启动程序。全站仪自动搜索到前视棱镜(即新激光站点)后,自动瞄准棱镜进行测量。屏幕显示计算出来的新激光站点坐标。在测定新激光站坐标时,为避免获得错误的数据,须遮盖住其他的反射棱镜。新激光站点的坐标测定后,将全站仪和后视棱镜转移到新的位置。全站仪和后视棱镜转移到新的位置后,主控室按功能键F2进行确认,新的信息窗口会显示新激光站点三维坐标,然后将新激光站点上的全站仪手动转向新的后视点即原先的激光站,按下F2,重新调整定位全站仪上的刻度。成功执行上述的步骤后,出现一新的信息窗口。通过按下F2功能键完成激光站移站程序。
2.2.2.3激光站的人工检查
在推进的过程中,可能会由于安装托架的管片出现沉降、位移或托架被碰动,使激光站点或后视靶的位置发生变化,从而全站仪测得错误的盾构机姿态信息。为了保证激光全站仪的准确定位,在SLS-T软件的状态为“推进”时,通过功能键F5对全站仪的定位进行检查,如果测得的后视靶的值超过了在编辑器中设定的限值时,需要对激光站进行人工检查。检查方法是利用洞内精密导线点对激光站点及后视靶点位置进行测量,重新确定两点的三维坐标。设站导线点尽量选择在右侧管片侧壁上的强制对中导线点,这样建测站时能够一次建站测算出两个点位的坐标,避免误差的积累。当不满足上述建站条件时,从隧道内主控制导线点引测至后视靶托架上,在托架上建立测站,测定激光站点的三维坐标。
2.3 导向系统维护与检修
2.3.1导向系统维护
2.3.1.1ELS靶:
1.由于ELS靶的安装位置附近有注浆管,在注浆的过程中很容易被人碰到,而前面板是玻璃作成的,容易被破坏特别是ELS棱镜更是容易被工人碰动,在没有对ELS靶进行保护之前,我们的ELS棱镜曾多次被工人碰掉,对掘进造成不小影响。后来我们在ELS靶的四周用4块木板保护起来后,就再也没有人碰掉ELS棱镜了;2.ELS靶前面板保护屏要经常擦干净,防止激光接收靶接收的信号太弱;3. ELS靶附近不能有强光,强光会使VMT姿态显示不正常。
2.3.1.2电缆:
在前期我们按常规安装好导向系统传输电缆卷后,在盾构机向前推进的过程中,经常把传输电缆拉断。严重的时候,甚至把激光站托架都拉动,把黄盒子拉掉,还威胁到激光全站仪的安全,极大地破坏了导向系统。为了克服这个问题,我们采用了三种办法。1.把在导向系统的传输电缆卷安装在激光站的前面,这样盾构机推进时,电缆一直是顺着拉;2.在盾构机电缆经过的地方用安全网覆盖,把盾构机上的各个突起物盖住,防止勾断电缆;3.通过加强平时的巡视,经常整理传输电缆。通过以上办法后,电缆再也没有被拉断过。
2.3.1.3激光站和黄盒子:
1.在始发时,由于激光站托架是安装在竖井里面,激光全站仪和黄盒子容易被雨水淋湿,一定要加以保护。2.在隧道里面时,由于工人冲洗管片时,容易被水浇湿,需要经常提醒掘进工人。激光全站仪和黄盒子要经常擦干净、凉干。
2.3.2导向系统故障处理
2.3.2.1ELS靶:
1. ELS靶的前面板被注浆的浆液覆盖,ELS靶接收到的激光信号不够强,导致不工作,处理办法是把前面板的覆盖物清理干净;2.ELS靶的前面板附近有很强的光源,严重干扰了ELS靶对激光信号的接收,导致VMT显示不正常,处理办法是把光源移开;3.ELS靶的温度太高,导致ELS靶不工作,处理办法是用湿毛巾冷敷ELS靶降温。4.ELS靶和激光站之间空间被人或其他东西挡了,导致ELS靶接收不到激光信号,处理办法把障碍物移开,如果移不动,就移激光站,把激光站向前移到适当位置。
2.3.2.2激光全站仪:
1.激光全站仪被水淋了,不能正常工作,处理办法是把全站仪卸下来,擦干净凉干;2. 全站仪的气泡偏了,VMT显示姿态偏差变大,处理办法是把全站仪再次整平,然后做一下全站仪方位检查,如果检查超限,就需要重新测定激光站的坐标,千万不要在不测定变动后的激光站坐标的情况下重新定位测量。这样只能误导VMT导向系统给出错误导向。如果检查未超限,就直接重新整平仪器,重新定位测量。3.全站仪在定位时没有关掉全站仪的电源,定不了位,处理办法是把全站仪的电源关掉,重新启动定位程序。4.全站仪找不到ELS靶,处理办法是首先看全站仪与ELS靶之间的空间有没有障碍物挡,如果有,将其移开。如果还收寻不到,就人工测量出激光站至ELS靶的方位,手动输入到激光站编辑器里的方位当前值里。
2.3.2.3电缆:
电缆被拉断,导致不能传输数据或电流。处理办法是沿着线路一直排查,直到找到断裂出,把电缆接好。
3.盾构姿态人工复测
3.1盾构姿态人工检测概述
在盾构施工的过程中,为了保证导向系统的正确性和可靠性,在盾构机掘进一定的长度或时间之后,应通过洞内的独立导线独立的检测盾构机的姿态,即进行盾构姿态的人工检测。盾构施工中所用到的坐标系统有三种:全球坐标系统、 DTA坐标系、TBM坐标系。
3.2盾构机参考点的测量
在进行盾构机组装时,VMT公司的测量工程师就已经在盾体上布置了盾构姿态测量的参考点(共21个),如图9。并精确测定了各参考点在TBM坐标系中的三维坐标。我们在进行盾构姿态的人工检测时,可以直接利用VMT公司提供的相关数据来进行计算。其中盾体前参考点及后参考点是虚拟的,实际是不存在的):
图9 S267盾构机参考点的布置
盾构姿态人工检测的测站位置选在盾构机第一节台车的连接桥上,此处通视条件非常理想,而且很好架设全站仪。只要在连接桥上的中部焊上一个全站仪的连接螺栓就可以了。测量时,应根据现场条件尽量使所选参考点之间连线距离大一些,以保证计算时的精度,最好保证左、中、右各测量一两个点,这样就可以提高测量计算的精度。例如在我们在选择S267盾构机的参考点时,即是选择的1、10、21三点作为盾构姿态人工检测的参考点。
3.3 盾构姿态的计算
3.3.1盾构姿态的计算原理
盾构机作为一个近似的圆柱体,在开挖掘进过程中我们不能直接测量其刀盘的中心坐标,只能用间接法来推算出刀盘中心的坐标。

图10盾构姿态计算原理图
如图A点是盾构机刀盘中心,E是盾构机中体断面的中心点,即AE连线为盾构机的中心轴线,由A、B、C、D、四点构成一个四面体,测量出B、C、D 三个角点的三维坐标(xi,yi, zi),根据三个点的三维坐标(xi, yi, zi)分别计算出LAB, LAC, LAD, LBC, LBD,LCD, 四面体中的六条边长,作为以后计算的初始值,在盾构机掘进过程中Li是不变的常量,通过对B、C、D三点的三维坐标测量来计算出A点的三维坐标。同理,B、C、D、E四点也构成一个四面体,相应地求得E点的三维坐标。由A、E两点的三维坐标就能计算出盾构机刀盘中心的水平偏航,垂直偏航,由B、C、D三点的三维坐标就能确定盾构机的仰俯角和滚动角,从而达到检测盾构机姿态的目的。
3.3.2通过AutoCAD作图求解盾构姿态
通过几何解算盾构姿态方法的缺点是在内业计算时,如果用人工手算,其工作量相当大,而且难免出错,因此我们在进行解算时,是利用AutoCAD进行作图求解,相对于用几何方法解算,速度要快很多。其操作过程如下:
首先是把隧道中心线(三维坐标)通过建立CAD脚本文件输入CAD中,这个工作一个工地只要做一次。然后是把所测参考点1、10、21的坐标(三维)输入到CAD里面。分别以1、10、21为球心,以1、10、21到前点的距离为半径画球,求三个球的交集。用鼠标左键点击交集后的体,就可以找到两个端点,这两个端点到1、10、21的距离就分别等于1、10、21到前点的距离。然后根据盾构掘进的方向,舍去其中一个点。同样方法把后点在CAD里画出来。由于后点通过求交集的方法求出的两个端点距离很近,通过盾构机的掘进方向很南判断,于是通过前点到后点的距离是3.9491米来判断。画出前后点的位置后,通过前后点向隧道中线做垂线,通过测量垂线在水平和垂直方向上偏离值来求解盾构机前后点的姿态。盾构机的坡度=![]() 为盾体前后参考点连线长度)。根据测量平差理论可知,实际测量时,需要观测至少4个点位以上,观测的参考点越多,多余观测就越多,因此计算的精度就越高。比较VMT导向系统测得的盾构姿态值和人工检测的盾构姿态值,其精度基本上能达到±5mm之内。
为盾体前后参考点连线长度)。根据测量平差理论可知,实际测量时,需要观测至少4个点位以上,观测的参考点越多,多余观测就越多,因此计算的精度就越高。比较VMT导向系统测得的盾构姿态值和人工检测的盾构姿态值,其精度基本上能达到±5mm之内。
图11盾构姿态CAD计算示意图
4.管环检测
4.1管环测量概述
由于在盾构掘进过程中,刚拼装的管环还没有来得及注入双液浆加固,因此还不稳定,经常发生管环位移现象。有时位移量很大,特别是上浮,位移量大常常引起管环限界超限。因为地铁施工中规定,拼装好的管环允许最大限界值是±10㎝。为了防止管环的侵限,我们首先是提高控制测量的精度外,其次是提高导线系统的精度,最后就是通过每天的管环测量,实测出管环的位移趋势,采取措施尽量减小位移量。当然,管环测量还起到复核导向系统的作用。
4.2管环测量方法
根据管环的内径是2.7米, 采用铝合金制作一铝合金尺,铝合金尺长3.8米(可根据实际情况调整长度)。在铝合金尺正中央,贴上一个反射贴片。根据管环、铝合金尺、反射贴片的尺寸,就可以计算出实际上的管环中心与铝合金尺上反射贴片中心的高差。测量时,首先用水平尺把铝合金尺精确整平,然后用全站仪测量出铝合金尺上反射贴片中心的三维坐标,就可以推算出实际的管环中心的三维坐标。每次管环测量时,应重叠5环已经稳定了的管环,这样就可以消除测错的可能。
图12.管环测量示意图
图13管环中心标高推算示意图
4.3管环姿态计算
管环测量时,把管环检测外业数据直接存储在全站仪的内存里。回到办公室后,通过徕卡测量办公室软件(Leica Survey –Office),将全站仪里面的管环测量外业数据下载,然后将其复制到EXCLE表格中编辑成CAD认识的三维坐标,然后将三维坐标数据复制到记事本程序里面保存,文件的后缀名必须是.SCR,如“管环检测外业数据.SCR”。这样就把管环检测的外业数据编辑成了CAD的画点脚本文件。通过CAD的脚本功能,就很方便快节地在CAD里面把点画出来。
打开AutoCAD,在模型状态下(一定要关闭“对象捕捉”命令),打开菜单栏的“工具(T)”选项,在下拉子菜单中选择“运行脚本(R…)”,或者在命令行中输入“.SCR”,两种方式都是运行脚本,AutoCAD便查找脚本文件。操作者找到要调用的脚本文件“管环检测外业数据.SCR” 后,直接打开它。AutoCAD 便自动把点画出来了。如下图14。

图14 管环姿态计算示意图
点位画出来后,就可以在CAD里通过查询命令直接量出管环的水平和垂直姿态了。通过以上管环的测量和计算方法,解决了管环检测数据量大,计算难,测量时间长的问题。大大提高管环检测的效率和准确度。
5. 结束语
由于盾构机的VMT导向系统必须有控制测量的支持才能运作,所以控制测量还是盾构隧道测量的基础。为了保证隧道的顺利贯通,我们首先要做好控制测量,然后就是保证导向系统的正常运行,定期对盾构姿态进行人工检测,保证导向系统的正确可靠。加强管环姿态检测,及时发现管环的位移趋势,防止管环安装侵限。加强管环姿态的检测同时也是对导向系统的复核。由于笔者才疏学浅,文中难免有不周全之处,恳请各位提出批评与建议。