上海华测自主研发了一整套以HCMonitor为核心的变形监测系统,曾获得科技进步二等奖,并先后成功应用于润扬大桥、东海大桥、阳逻江大桥、上海长江大桥、闵浦大桥等国家重点项目,实践证明,以HCMonitor为核心的实时形变监测系统是一个非常有效的桥梁监测技术,GNSS能够与其它传感器完美结合用于桥梁健康监测。
图为东海大桥(2006年开始运行华测桥梁健康监测系统)
GNSS自八十年代中期投入民用后,已广泛地在导航、定位等各领域应用,尤其在测量界的控制测量中起了划时代的作用。正因为是它在静态相对定位中的高精度、高效益、全天候、不需通视等优点,使人们普遍采用其来代替(逐渐地)常规的三角、三边、边角等方法,并在理论、实践中取得了可喜的成果。在精密工程形变监测中也逐步得到广泛的应用。随着社会经济和科学技术的快速发展,造桥技术不断进步,桥梁结构逐步向轻巧、纤细方面发展。与此同时桥梁的载重、跨径和桥面宽度不断增长,结构型式不断变化。传统的形变监测手段越来越不能满足形变监测要求,这就迫切需要性能更可靠的桥梁健康监测系统。目前,随着GNSS技术的不断成熟,GNSS自动化监测系统已经在桥梁、建筑、地震、大坝等行业中应用并取得很好的效益。GNSS自动化监测系统仪器以其卓越的性能受到专家的好评。目前,采用GNSS技术用于桥梁等工程形变监测的手段已经被广泛的应用于世界各地。例如:英国Humber桥的GNSS监测系统、日本明石海峡大桥的GNSS监测系统、虎门大桥GNSS监测系统、青马大桥、汲水门大桥和汀九大桥的GNSS监测系统。
HCMonitor的系统结构
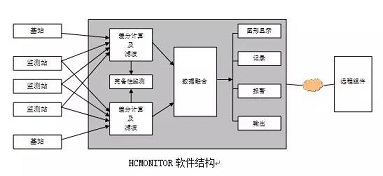
HCMonitor软件通过网络或串口(RS232,或者CAN总线)获得GNSS的原始数据(载波相位和伪距),对其进行差分处理和滤波,并根据系统设置,实现图形显示、记录、报警、输出、分析。输出的各监测点三维坐标的格式我们会依据客户的要求做相应修改,保证客户端软件正常读取数据。另外软件还提供了一个远程组件,方便用户的二次开发。
软硬件平台硬件平台:至强服务器 2CPU,4G内存(GNSS专用)软件平台:Windows2008数据库平台:SQL网络平台:十兆或百兆以太网;GNSS所有的应用软件均部署在上述的硬件平台上。必须保证软件在正常工作时CPU的平均使用率不超过60%。
基本功能和指标
1) 可对GNSS原始数据进行实时差分处理,数据更新率可达1Hz、5Hz、10Hz、20Hz;2) 可根据系统参数设置,对不同的监测站的实时差分结果进行Kalman滤波,达到不同的动态要求和精度要求;3) 最多可同时处理多个基站和32个监测站的数据;4) 输入接口协议:RS232、CAN、TCP/IP;5) 输出接口协议:TCP/IP;6) 实时显示基线的变化情况,点位的移动情况等,软件包括如下视图:实时数据视图、实时网图、趋势图、卫星视图、三维视图、数据管理。7) 原始数据、解算结果的自动保存功能,可根据用户需求进行设置;8) 对监测站、基站接收机的远程设置功能,软件上有各个GNSS接收机的独立监控模块,可以向GNSS接收机发送用户更改参数的命令(如采样间隔、高度截止角等);9) 系统完备性监测功能,可对整个系统的健康状况进行监测,包括软件和硬件,比如,一旦某个监测站出现死机现象,软件马上会通过数据信号触发的方式实现接收机自动重启;10)每个监控站的监控范围可根据用户设置,相应的精度可从2毫米到1厘米(具体精度还与所使用的GNSS接收机及其天线有关)。11)回放功能。回放功能分为两个层次:原始数据层,软件记录原始数据后,可以任意截取其中部分数据,并根据原始数据重新解算并回放的功能;历史状态层,即根据所选择的时段,对系统的实际工作状态进行回放。12)实时的数据采集的延迟不大于1秒。13)可以调整各个监测站的位置更新率;14)连接数据库,记录用户需要保留的各项信息;记录的内容如下:15)第三方软件接口,用COM组件的方式实现,可实现远程查询、管理、报警;16)报警功能,报警项可根据用户要求设定,可通过短信、电子邮件等方式进行报警。17)权限管理:一般用户只能浏览数据,系统管理员才可能对一些参数进行设置。18)数据分析功能:根据用户要求,对监控点进行频域和时域分析。19)可靠性:7×24小时持续可靠工作。
实时显示各监测点的点位信息
HCMonitor的特点(与RTK比较)
集成了RTK功能的HCMonitor软件,除了也能采用RTK方法之外,采用其自身与RTK不同的算法后,还具有如下一些特点。算法相比RTK方法而言,HCMonitor的算法具有如下特点:u HCMonitor采用采用同时刻(在1微秒之内)的GNSS原始观测值进行差分解算;而RTK方法不需要差分改正数和流动站的观测数据保持同步,一般的参考站接收机差分改正数广播更新率为1Hz,因此,一般情况下差分改正数会延迟0.5秒到2秒不等,在特别情况下,流动站能允许1分钟之前的差分改正数参与解算;u HCMonitor可以采用扩展的动态非线性Kalman滤波算法(通过系统输入输出观测数据,对系统状态进行最优估计的算法)进行差分解算。u HCMonitor的算法对系统的硬件要求较高,在高性能计算机上运行,而RTK的算法总是由GNSS接收机生产厂商提供,固化在GNSS接收机内部。精度HCMonitor直接应用GNSS接收机的原始数据,参考站和流动站的观测数据保持严格的同步,所以,大气层延迟造成的公共误差被最大程度地抵消,HCMonitor还采用滤波方法消除GNSS动态定位数据中的各种随机误差,是输出的定位结果更符合真实的情况,所以HCMonitor根据采用的GNSS接收机和GNSS天线的不同,可以保证毫米级的定位精度,而通常的RTK接收机动态定位精度为厘米级。在一个静止点上,采用普通的双频GNSS接收机天线进行RTK进行定位,得到结果如下图所示:
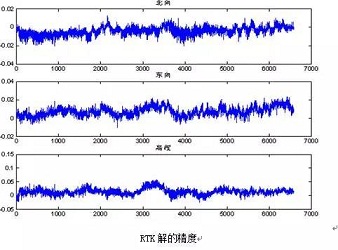
可见RTK的定位精度平面在2个厘米之内,高程在4个厘米之内。采用同样的GNSS接收机,在一个静止的点上,观测5个小时的数据,用HCMonitor软件对其进行处理,得到结果如下图所示:
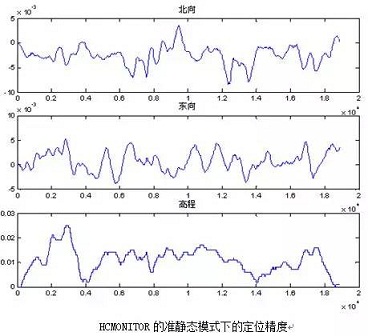
可见HCMonitor能显著提高GNSS的定位精度。上图中,平面精度在5mm左右,高程精度在1厘米左右。如采用高精度双频GNSS天线,能更进一步提高其精度。

通讯因为HCMonitor仅要求收到GNSS接收机的原始观测数据,所以,原则上,应要求软件(服务器)与GNSS接收机之间仅要求实现单向通讯。而通常的RTK方法,要求参考站和流动站之间进行通讯,又要求流动站和数据中心之间进行通讯。在HCMonitor方式下,流动站的原始数据仅需要一次串口数据通讯和一次网络数据通讯,就可以到达数据中心,参考站可以直接与数据中心服务器相连。
系统可靠性RTK通常应用于测量、高精度导航等,对于RTK接收机而言,如GNSS信号发生失锁那么接收机需要重新初始化,求解整周模糊度,从而造成短时间隔内不能正常输出厘米级定位解。而HCMonitor专为形变监测而设计,适用于桥梁、大坝、矿区、滑坡等的形变监测,软件能长时间持续可靠工作,诸如RTK经常需要重新初始化等缺点在HCMonitor里并不存在。HCMonitor软件运行在数据中心的计算机上,整个计算功能可以设计成冗余模式,增加系统的可靠性,而RTK方法不能实现类似的功能。