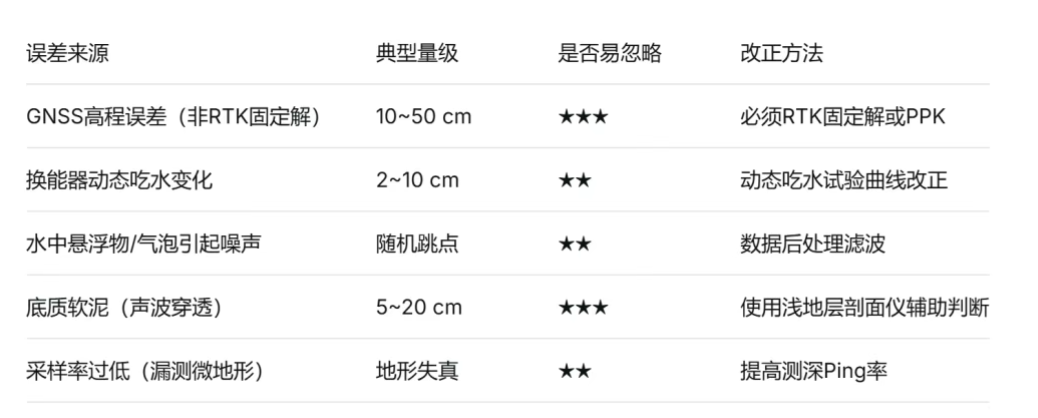
在水库库容计算、航道疏浚、海底地形测量等工作中,水下高程(水深)的精度直接影响工程质量和安全。然而很多测绘同行都有这样的困惑: “同样的设备、同样的流程,为什么今天测的和昨天测的数据对不上?” “明明RTK是固定解,为什么水深与历史数据差了十几公分?” “内河水深准了,到海边怎么就飘了?” 事实上,水下高程测量远比陆地测量复杂。声速、潮位、吃水、盐度、船体姿态……每一个变量都可能成为误差的“隐形杀手”。 今天我们就从物理原理到工程实践,系统分析水下高程测量误差的主要来源及应对策略。 01 最大元凶:声速——水下测量的“变色龙” 单波束或多波束测深仪的核心原理是:声波往返时间 × 声速 ÷ 2 = 水深。 关键问题在于:声速不是固定的。它在水中的传播速度随温度、盐度、静水压力的变化而改变,范围大约在1400~1550 m/s之间。 典型声速变化幅度 实际场景案例: • 淡水水库(夏季):表层水温25℃,声速约1525 m/s • 海水(冬季):表层水温5℃,盐度30‰,声速约1440 m/s 同一个测深仪,从内河开到海边,如果不重新校准声速,仅声速偏差就可能造成超过0.3米的水深误差!这就是为什么你在海边测得的数据总是“偏浅”。 解决措施 • 每次作业前、作业中,用声速剖面仪实测声速 • 对于水深变化大、温跃层明显的区域,分层改正 • 配备声速自动改正功能的测深系统 02 隐蔽杀手:吃水与换能器安装——船不“平”,水就不“准” 吃水是指换能器(探头)入水的深度。看似简单的扣除,实际暗藏陷阱。 常见吃水误差来源 1. 静态吃水测量不准 ◦ 测量方法:从水面到换能器底部,在船静止时测量 ◦ 误差点:船体晃动、水面波浪、测量尺不准,容易产生±2~5 cm误差 2. 动态吃水变化 ◦ 船航行时,船体下沉(船速越快,下沉越明显),动态吃水比静态吃水增加数厘米 ◦ 有些船重载和轻载时吃水变化可达10 cm以上 3. 换能器安装偏差 ◦ 换能器不是垂直向下(偏角1°→水深20米时,水平偏移0.35米,水深误差约3厘米) ◦ GNSS天线与换能器的垂直偏移量和水平偏移量测量不准 案例 某河道测量,船速4节时动态吃水比静态多出6 cm,未改正直接导致整条河断面水深被低估6 cm,库容计算偏差数万立方米。 解决措施 • 静态吃水:精确测量,多次取平均 • 动态吃水:通过航行试验(船速—吃水关系曲线)进行改正 • 安装校准:做“摆台试验”或“横线试验”校准换能器偏角 03 潮位与基准面:海陆衔接的“错位陷阱” 水下高程测量的最终结果,必须归算到统一的高程基准面(如85高程基准、理论最低潮面)。潮位改正和基准面转换是误差的主要来源之一。 3.1 潮位改正误差 在海边或感潮河段,水位随时间变化。水深测量必须同步记录瞬时水位,再通过潮位数据改正到基准面。 常见问题: • 潮位站与测区距离过远,潮时差和潮差差异导致改正不准 • 无实测潮位站,用预报潮汐代替,误差可超20厘米 • 大潮小潮期间潮位变化规律差异大,未区分处理 3.2 基准面转换误差 海边常使用理论最低潮面,内河常用85高程基准或假定基准。不同基准面之间的转换参数如果错误或未使用,会造成系统性误差。 例如:某工程同时引用海图水深(理论最低潮面)和陆域地形图(85高程),两者转换关系若差10 cm,堤顶高程设计就会出错。 解决措施 • 在测区附近设立临时潮位站,或使用高精度潮汐模型 • 精确测定测量区域当地基准面与85高程基准的差值(可咨询当地海洋或测绘部门) 04 船体姿态:波高一点点,误差一片片 无人船或测量船在风浪中航行时,会产生横摇(Roll)、纵摇(Pitch)和艏向变化(Yaw)。 姿态对水深的影响 当船体倾斜时,测深仪换能器发射的声波不再是垂直向下,而是倾斜一个角度。这会导致: • 实测水深 > 真水深(斜边大于直角边) • 水平位置偏移,与GNSS定位不匹配 改正公式:改正后水深 = 实测水深 × cos(横摇角) 当横摇角为5°时,水深20米处的误差约8厘米;横摇角10°时,误差超过30厘米。 在风浪稍大的外业中,船体晃动不可避免。如果测深仪未接入高精度姿态传感器(IMU),误差就可能进入分米级。 解决措施 • 配备高精度姿态传感器(精度优于0.1°) • 软件中进行实时或后处理姿态改正 • 选择风浪较小的气象窗口作业 05 其他常见误差源速查表 06 总结:提高水下高程精度的“黄金法则” 水下高程测量是一个多重物理过程耦合的系统工程。误差从来不是单一来源,而是多种因素叠加的结果。 要获得高精度的水下高程数据,建议遵循以下原则: 1. 声速为先:每次作业实测声速剖面,不能凭经验值 2. 动态吃水要测:不要只测静态吃水,航行试验必须做 3. 姿态改正不能省:哪怕是10公分的要求,也要配姿态仪 4. 基准面搞清楚:转换参数提前核实,统一成果基准 5. 质量控制闭环:布设检核线、比对已知点,验证成果精度 一句话总结:声速、潮位、吃水、姿态、基准——这五个环节,漏掉一个,误差就可能超标。 掌握这些原理,你就能在实际工作中追着误差跑,而不是被误差追着跑。