1 研究背景
目前自动化监测技术在基坑监测中已广泛应用,不管是测量机器人还是高精度的传感器亦或是系统的集成和数据库的研发都取得了良好的效果。目前我单位在南京市新街口某深大基坑投入的自动化监测系统也一直正常运作,保证着基坑及周边环境的安全。但实际应用发现自动化监测需要布设监测点、埋设传感器,工作量大,且监测点容易破坏,无法保障数据的连续性。同时基坑自动化监测为点式数据的采集,分析时以点代面进行区域的变形分析,分析结果往往缺乏系统性和整体性。因此,为解决这方面的缺点,我们想到了三维激光扫描。作为测绘领域的又一次技术革命,三维激光扫描能够以非接触的方式快速、精确、全面地获取研究对象表面的高密度三维点云数据,为空间三维信息的获取提供了全新的技术手段。它突破了传统的单点接触式的数据采集,同时提高了数据采集效率及变形分析完整性。在此背景下,我们以新街口该项目为例开展了三维激光扫描在基坑监测应用的研究。

2 三维激光扫描的特点
该项目基坑面积约21960m2,基坑周长约703m,基坑开挖深度22.80~25.40m,基坑开挖影响范围内有商场、地铁车站、地下管线等重要建(构)筑物。根据现场情况,结合监测的精度要求,我们三维激光扫描仪选用的法如FocusS350。该仪器具有高精度 CCD 摄像机,通过扫描能够集成高精度点云与真 实色彩于一体。扫描仪作业时的扫描速度最高可达 97 万像素点每秒,而且能够定义区域的数据,使仪器在更远的距离以更高的分辨率采集目标。
3 三维激光扫描监测工作流程
根据基坑设计平面图及现场的实际情况,确定测站、标靶及监测点的分布。根据基坑空间尺寸测站采用自由架站,一共架设8站。监测点利用强制对中装置,可以同时放置棱镜及标靶。现场设置5个控制点,控制点设置标靶,标靶测量精度是三维点云精度的前提,我们利用 TM50 全 站 仪 ( 测 角 精 度 ± 0. 5″,测 距 精 度 0.6 mm+1 ppm) ,精确测定标靶的中心坐标,用于获取三维点云的绝对坐标及高程。每两站之间至少有 3个公共标靶可见,激光扫描时同步扫描标靶,用于数据后处理时两站之间的拼接。采用 Super High 分辨度对标靶进行局部扫描,用 Middle 分辨率进行基坑侧壁扫描,单站扫描时间约 8min。扫描获得的数据是带有三维坐标的点云数据,将扫描数据导入法如SCENE后处理软件,对点云过滤,删除多余数据,降低点云密度,提高后续处理的效率。点云过滤后进行点云拼接,利用两个标靶进行拼接,第三个标靶作为多余观测,进行平差计算,提高拼接精度。本项目在基坑开挖、底板浇筑及支撑拆除过程中共分三次进行基坑三维激光扫描。
4 建议及展望
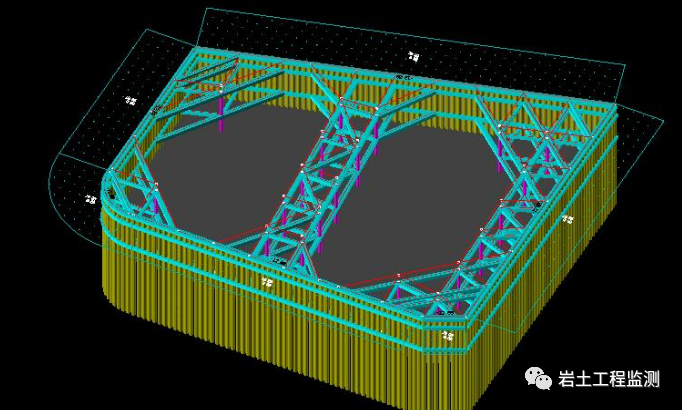
目前正在进行各期点云数据的拼接精度分析、三维建模及变形分析对比,在点云去噪、配准、拼接建模过程中,对三维激光扫描在基坑监测中的应用有以下思考:
(1)该项目基坑监测采用站式三维激光扫描仪,对于空间尺度较大的基坑需要搬站,后期处理需要拼接,高比例重叠产生大量冗余数据,对后续的工作带来了巨大的工作量,同时也干扰了变形分析。
(2)对于空间尺度较大基坑多站拼接会影响到最后的监测精度,达不到预想的效果。扫描距离的远近同样影响点云数据的精度。因此,三维激光扫描在小尺度基坑监测中会有更好的效果。
(3)三维激光扫描针对基坑监测时,监测频率低,不能保证实时监测并及时掌握基坑的变形发展趋势,因此只能在基坑风险较大区域、周边环境敏感区域进行选择性的变形分析。
(4)基坑工程场地机械设施众多、周边环境复杂,获取的点云数据具有海量化和高密度的特点,后期处理工作量极大。因此,针对基坑工程的特点研发具有针对性的点云处理程序对于提高数据处理效率、保证数据的真实性具有重要的意义。
(5)点云数据经过处理后,建立的基坑三维模型具有可视化及高精度的特点,因此可考虑三维激光扫描技术在验证基坑支护设计和检验基坑工程施工质量方面的作用。